科研學術
我院朱延河教授團隊研制出新型TSM軟機械手 實現毫米級精度與超強環境适應性
近日,我院朱延河教授團隊成功研制出新型TSM軟機械手,研究成果以《擾動自适應錐形軟機械手配置任務性能增強的精密運動控制器》(Disturbance-Adaptive Tapered Soft Manipulator with Precise Motion Controller for Enhanced Task Performance)為題發表在《IEEE機器人學彙刊》(IEEE Transactions on Robotics)上。這一研究成果助力提高軟機械手的精密運動控制和擾動自适應能力,未來有望應用于健康養老領域。
軟機械手是軟體機器人領域的重要分支,靈感來自大象象鼻或章魚觸手。科學家們旨在開發像人的手臂一樣靈巧的軟機械手,同時能夠在與人類交互的過程中始終保持安全。為了解決這個問題,軟機械手領域需要更有前景的解決方案,其中包括高效的結構設計和精密運動控制器。
針對上述問題,團隊成功研制出一種由複合肌腱和氣動肌肉混合驅動的錐形軟機械手設計及精密運動控制器。機器人的驅動結構由首次提出的鮑登管和電纜肌腱組成的複合肌腱和氣驅錐形波紋管緊湊集成設計,實現了優異的可變剛度範圍。團隊提出的基于深度學習方法與閉環疊代反饋控制器結合的控制策略,實現了軟機械手的精密運動控制。實驗結果顯示出毫米級控制精度和對外部擾動的自适應性,新型TSM軟機械手在遙操作控制下成功進行了越障抓取操作,并驗證了其在人手幹擾下沿平面跟蹤軌迹的任務能力,為軟機械手設計與控制提供了新的解決途徑。
哈工大為論文第一單位。論文第一作者為哈工大機電學院博士生李相龍,新加坡國立大學博士生熊泉為論文共同第一作者。通訊作者為朱延河教授。共同作者包括哈工大機器人研究所所長趙傑教授,上海交通大學自動化系王賀升教授,哈工大機電學院鄭天驕副研究員,廣東省季華實驗室隋東寶博士,哈工大機電學院博士生張清華、李洪武和碩士生王子齊。
該研究獲得國家重點研發計劃等項目資助。
論文鍊接:https://ieeexplore.ieee.org/document/10577463
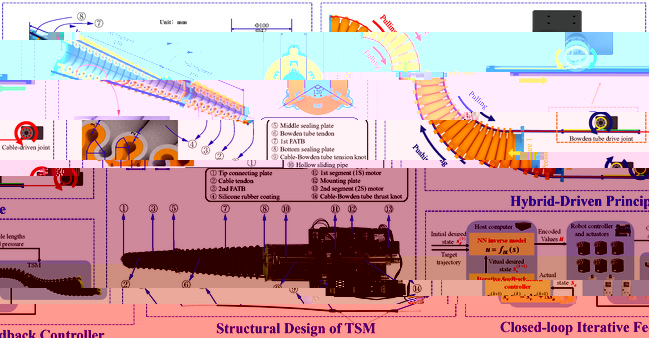
結合複合肌腱和氣動肌肉混合驅動的新型軟機械手設計和控制方案簡介
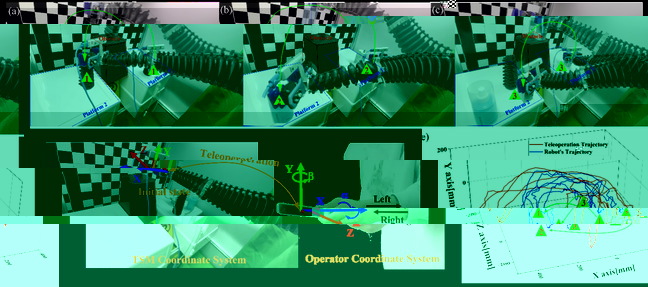
錐形軟機械手遙操作抓取控制驗證
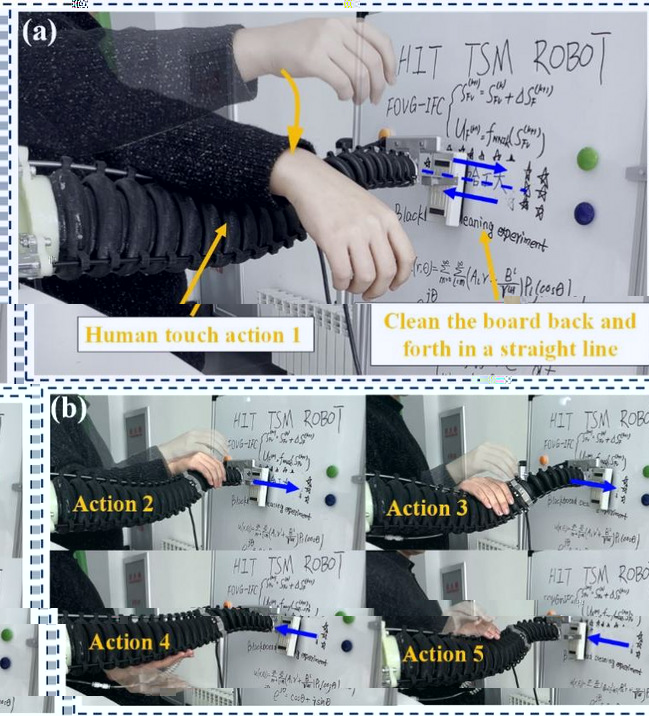
人手接觸下白闆擦除實驗的擾動自适應與人機安全性驗
FOVG-IFC方法的圓軌迹動态跟蹤
HIT輪廓軌迹定位
恒定空間點的姿态跟蹤控制
雜亂環境下的避障精密抓取
人手壓力幹擾時的寫字闆擦拭測試
來源:哈工大新聞網
